
Beaglebone Cape for Navspark NS-T
Goal
My next goal in the quest for a better NTP server is to improve the TCLKIN source. Previously, I was experimenting with TCXO's. I bought a Navspark NS-T (a timing-grade GPS receiver) and designed an adapter cape for it. This is my first time designing a circuit board, so I am expecting to run into problems.
I tried to design my board to minimize how expensive those problems would be to fix. The Navspark board is connected via headers, so it can be re-used in newer revision capes. The eagle files and PDFs are up on github.
Configuring the NS-T
After ordering all the parts, I got the Navspark first. I used their "GNSS Viewer" to configure it:
- Binary > Configure Power Mode > Normal
- 1PPS Timing > Configure 1PPS Frequency Output > 12MHz
- 1PPS Timing > Configure Timing > Static, [Lat/Long/Elevation]
A few seconds after a reset, the TIMEPULSE2 pin looks like this:
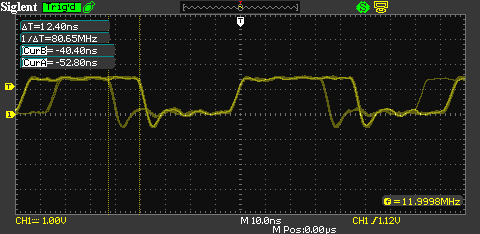
I believe the micro in this GPS receiver to be running at 81.84MHz, so this makes sense. It uses something like PWM to generate its 12MHz signal.
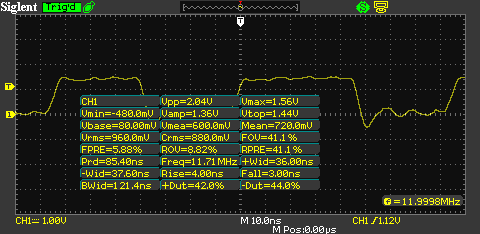
Turning all the scope's measurements on:
Assembling the cape
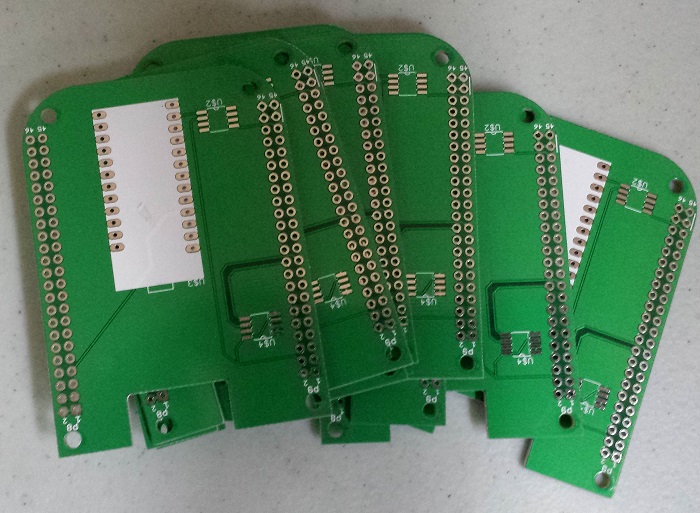
The boards arrived from Singapore:
I put the headers, the PLL, and the EEPROM on one of them:
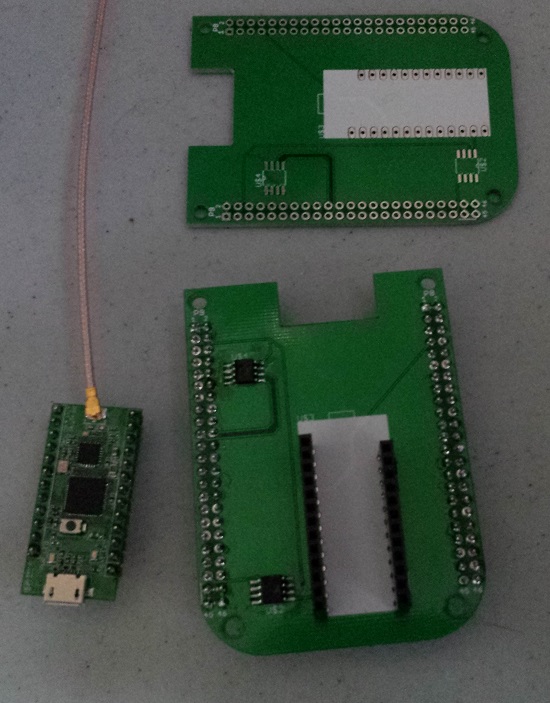
Tested for obvious problems with a multimeter, then put it on the BBB:
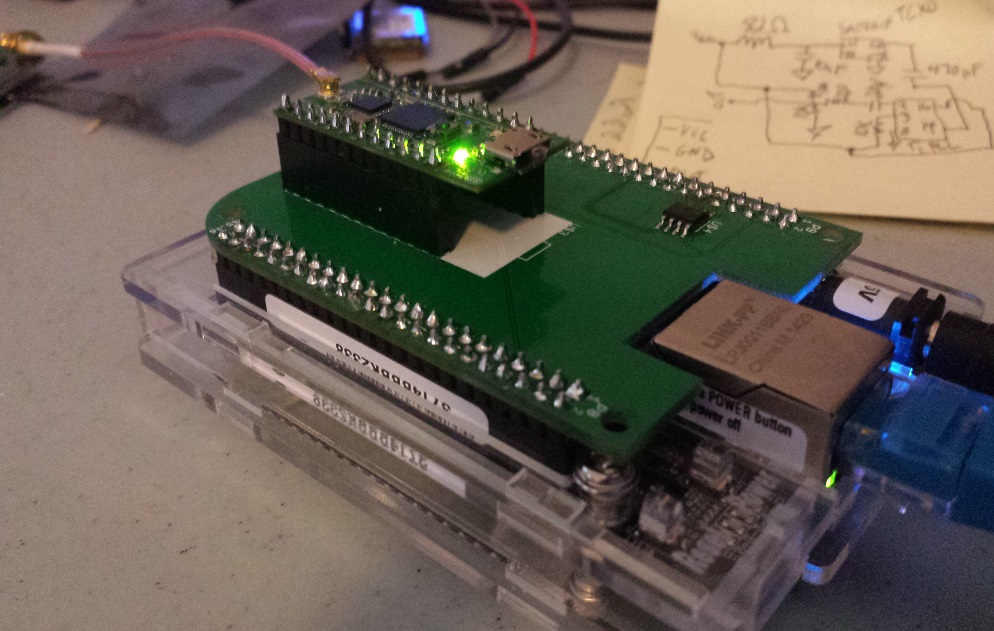
Unfortunatly, TCLKIN didn't work right away. The PLL isn't producing an output. The first problem is Output Enable is low on the PLL and it should be high. I hacked around that by clipping the package's pin and relying on the internal pullup. The second problem was input voltage. Putting a 10nf cap between NS-T's TIMEPULSE2 and the PLL's X1 was enough to move the DC offset.
The PPS signal, the GPS UART receive, and the EEPROM (at i2c address 0x54) worked right away.
After inserting the cap, the last 10 PPS counter cycles (should be 24M):
24000000
24000000
24000000
24000000
24000000
24000000
24000000
24000000
24000000
24000000
Output from chrony's status. clock.lan is a rpi-based NTP server:
# chronyc sources ; chronyc sourcestats ; chronyc tracking
210 Number of sources = 4
MS Name/IP address Stratum Poll Reach LastRx Last sample
============================================================================
#? NMEA 0 6 377 52 -82ms[ -82ms] +/- 100ms
#* PPS 0 4 377 17 -39ns[ -40ns] +/- 27ns
^? sandfish.lan 0 10 377 10y +0ns[ +0ns] +/- 0ns
^+ clock.lan 1 6 377 18 +31us[ +31us] +/- 260us
210 Number of sources = 4
Name/IP Address NP NR Span Frequency Freq Skew Offset Std Dev
===========================================================================
NMEA 4 3 199 -64.792 1032.478 -80ms 4793us
PPS 58 30 913 +0.000 0.000 -1ns 17ns
sandfish.lan 0 0 0 +0.000 2000.000 +0ns 4000ms
clock.lan 18 12 18m -0.003 0.093 +19us 32us
Reference ID : 80.80.83.0 (PPS)
Stratum : 1
Ref time (UTC) : Sun Mar 22 20:29:51 2015
System time : 0.000000001 seconds fast of NTP time
Last offset : -0.000000001 seconds
RMS offset : 0.000000001 seconds
Frequency : 0.000 ppm fast
Residual freq : -0.000 ppm
Skew : 0.000 ppm
Root delay : 0.000000 seconds
Root dispersion : 0.000018 seconds
Update interval : 16.0 seconds
Leap status : Normal
After running for over 3 hours, the PPS interval counter looks like this:
# awk '$1 > 1427043760 {print}' int.log | ~/bin/stats -f2
Field: 2
lines: 12729
mean: 24000000.000000000000
variance: 0.000000000000
std dev: 0.000000000000
sum: 305496000000.000000000000
min: 23999999.000000000000
max: 24000001.000000000000
Updates
Check out the current status after five and a half days.
Questions? Comments? Contact information